
© Gerhard Zimmermann 2024




Iron Man MK3 Helm




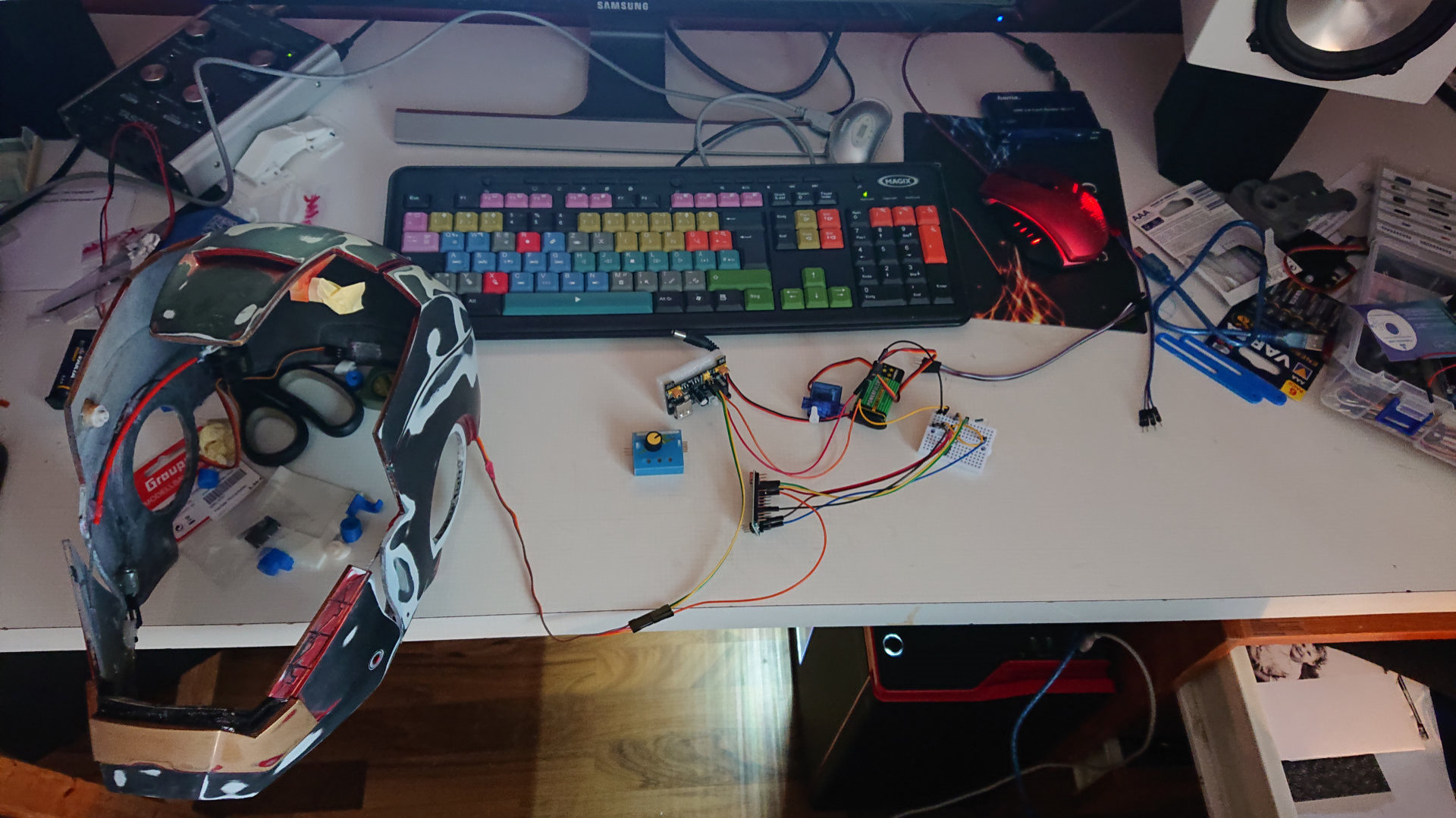

Das ist mein gedruckter Iron Man Helm. Gedruckt habe ich ihn aus PLA auf meinem Creality CR10 V2.
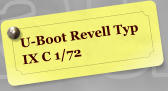
Mit insgesamt vier Mikro-Servos und einem Arduino habe ich ihn auch motorisiert.
Das ist der Arduino code:
const int servo1Pin = 6;
const int buttonPin = 2;
const int LEDPin = 5;
const int servo2Pin = 9;
const int Servo3Pin = 10;
const int Servo4Pin = 11;
int pos = 0;
int pos1 = 180;
int pos2 = 90;
#include <Servo.h>
Servo visorServo1;
Servo visorServo2;
Servo faceServo1;
Servo faceServo2;
void setup() {
visorServo1.write(60); // Initial position
visorServo1.attach(servo1Pin);
visorServo2.write(140); // initial position
visorServo2.attach(servo2Pin);
faceServo1.write(145);
faceServo1.attach(Servo3Pin);
faceServo2.write(40);
faceServo2.attach(Servo4Pin);
pinMode(buttonPin, INPUT_PULLUP); // Connect button between pin and GROUND. LOW when pushed.
pinMode(LEDPin, OUTPUT);
digitalWrite(LEDPin, LOW); // LED off
}
void loop() {
static unsigned long lastPushedTime = 0;
static boolean visorClosed = true;
static boolean lastButtonState = HIGH;
boolean newButtonState = digitalRead(buttonPin);
// If the button is down and it has been a while since it was last down...
if (newButtonState == LOW && lastButtonState == HIGH && millis() - lastPushedTime > 100) {
lastPushedTime = millis();
if (visorClosed) {
faceServo1.write(55); // Endlage Face geschlossen
faceServo2.write(124); // Endlage Face geschlossen
delay(300);
visorServo1.write(140); // Open visor Endlage Visor bzw Kinn geschlossen
visorServo2.write(60); // Open visor Endlage Visor bzw Kinn geschlossen
delay(1000);
visorClosed = false;
digitalWrite(LEDPin, HIGH); // Turn on light
}
else { // Viso is open
visorServo1.write(60); // Close visor
visorServo2.write(140);
delay(300);
faceServo1.write(155);
faceServo2.write(30);
visorClosed = true;
digitalWrite(LEDPin, LOW); // Turn off light
}
}
lastButtonState = newButtonState;
}















